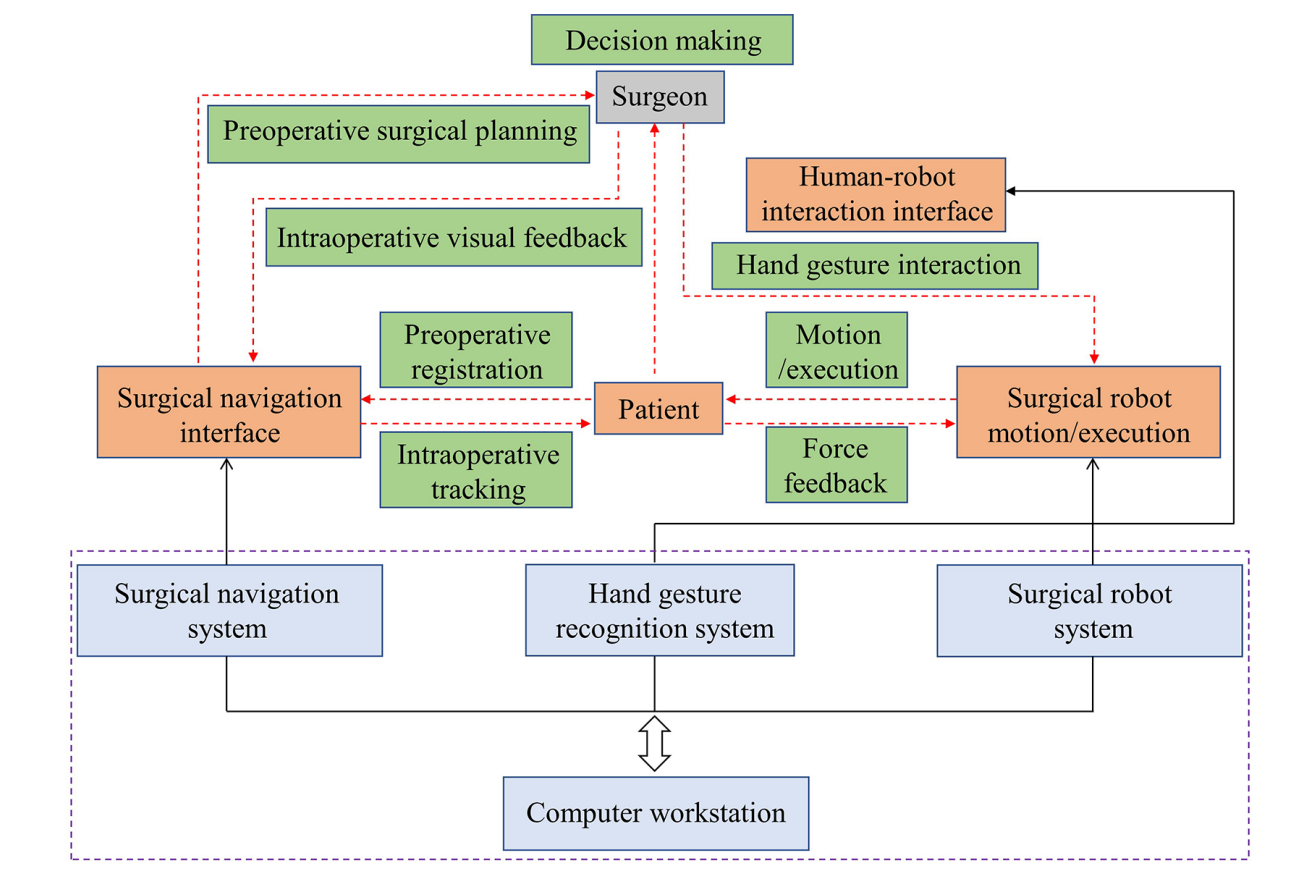
A touch-free human-robot collaborative surgical navigation robotic system based on hand gesture recognition
Jie Wang, Xinkang Zhang, Xinrong Chen†, Zhijian Song†
Frontiers in Neuroscience (IF=5.152)
Robot-assisted minimally invasive surgery (RAMIS) has gained significant traction in clinical practice in recent years. However, most surgical robots rely on touch-based human-robot interaction (HRI), which increases the risk of bacterial diffusion. This risk is particularly concerning when surgeons must operate various equipment with their bare hands, necessitating repeated sterilization. Thus, achieving touch-free and precise manipulation with a surgical robot is challenging. To address this challenge, we propose a novel HRI interface based on gesture recognition, leveraging hand-keypoint regression and hand-shape reconstruction methods. By encoding the 21 keypoints from the recognized hand gesture, the robot can successfully perform the corresponding action according to predefined rules, which enables the robot to perform fine-tuning of surgical instruments without the need for physical contact with the surgeon. We evaluated the surgical applicability of the proposed system through both phantom and cadaver studies. In the phantom experiment, the average needle tip location error was 0.51 mm, and the mean angle error was 0.34 degrees. In the simulated nasopharyngeal carcinoma biopsy experiment, the needle insertion error was 0.16 mm, and the angle error was 0.10 degrees. These results indicate that the proposed system achieves clinically acceptable accuracy and can assist surgeons in performing contactless surgery with hand gesture interaction.