Deep Graph Matching based Dense Correspondence Learning between Non-rigid Point Clouds
Jiazheng Luo*, Mingzhi Yuan*, Kexue Fu, Manning Wang†, and Chenxi Zhang†
IEEE Robotics and Automation Letters (2022, IF=3.741)
Abstract
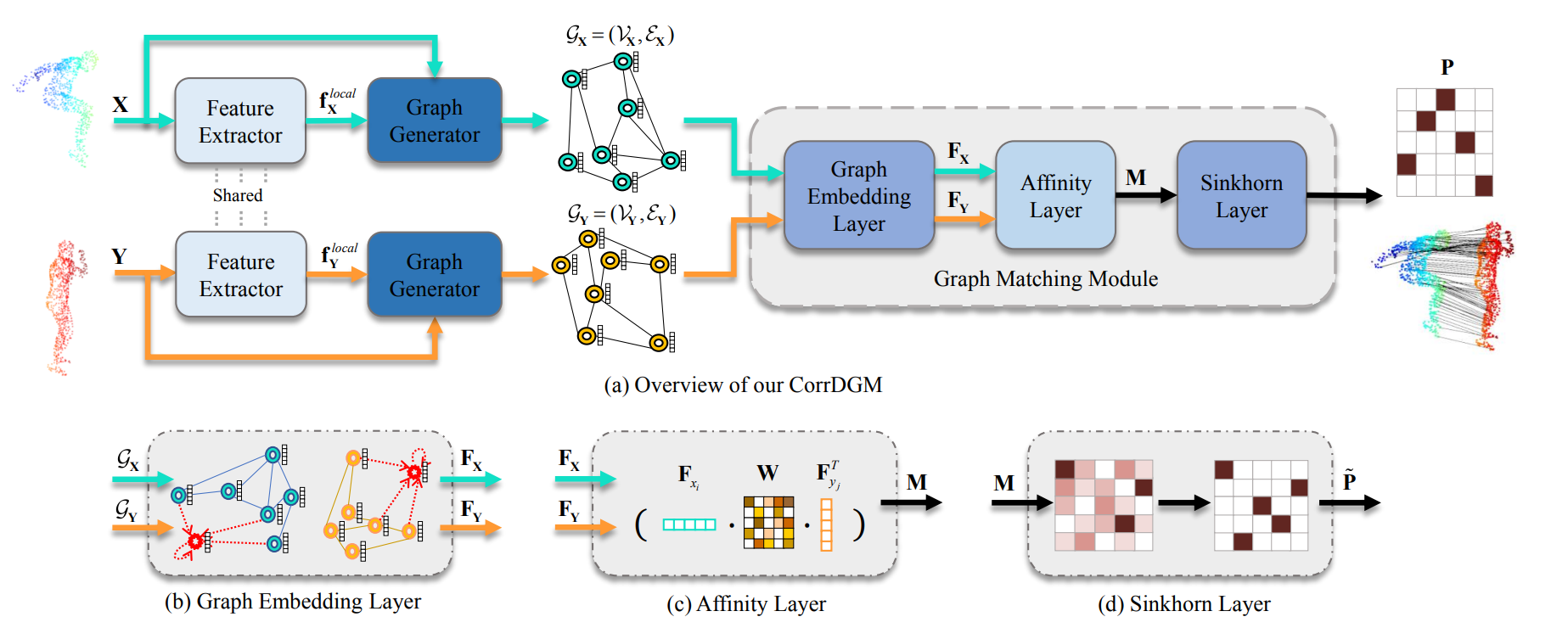
Building point-to-point dense correspondence between non-rigid shapes is a fundamental and challenging problem. Although functional map-based methods which calculate basis and convert point-wise map to functional map have shown promising performance on meshes, they are not directly applicable to point clouds. Recently, learning-based frameworks were proposed to estimate correspondence directly using extracted features from non-rigid shapes, but they could not handle serious deformation, especially with highly symmetrical and distorted shapes. In this letter, we propose a deep graph matching based end-to-end learning framework for building dense correspondence between non-rigid point clouds. Unlike functional map-based methods or recent learning-based studies, here we formulate correspondence estimation as a graph matching problem and use deep graph matching to better utilize both local geometry and global structure information. Specifically, we propose a Graph Generator, which takes high-dimensional features as nodes and calculates point-wise Euclidean distance as edges to build graphs. After the graphs topological structure information is embedded into nodes by the Graph Embedding Layer, the Affinity Layer and Sinkhorn Layer are used to estimate correspondence matrix between two point clouds finally. Extensive experiments on both synthetic and real scanned datasets show that the proposed method not only achieves better quantitative and qualitative performance, but also has better generalization than existing methods.
Paper Link: https://ieeexplore.ieee.org/document/9737412