Exploring Self-supervised Learning for 3D Point Cloud Registration
Mingzhi Yuan*, Qiao Huang*, Ao Shen, Xiaoshui Huang, Manning Wang☨
IEEE Robotics and Automation Letters (IF=4.6)
Abstract
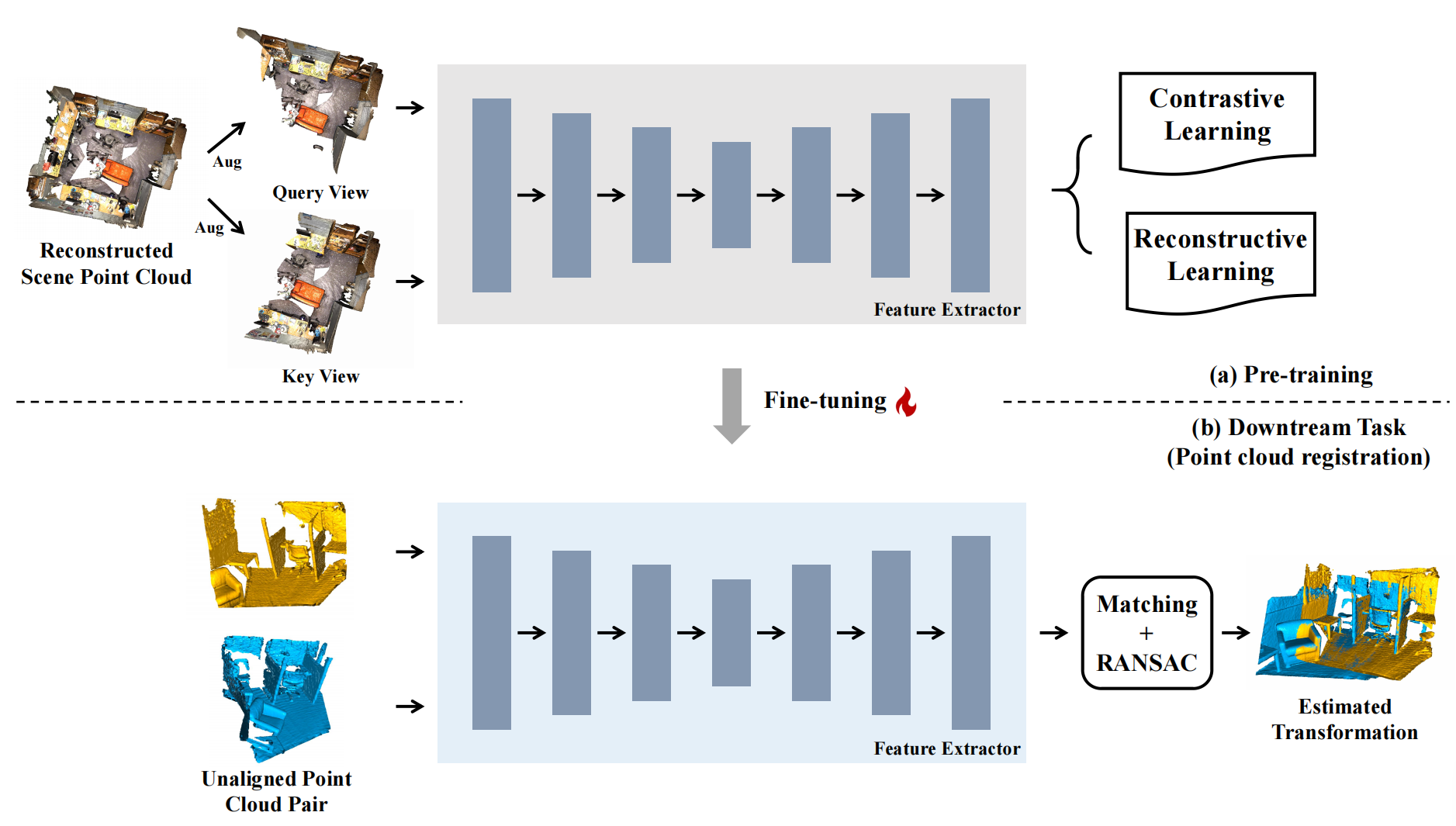
Self-supervised learning has achieved significant success in various fields such as point cloud detection and segmentation. However, self-supervised learning for point cloud registration is less explored. The recently proposed self-supervised learning framework MSC has paved the way for investigating self-supervised learning for registration. Based on this, we conduct a comprehensive exploration of applying self-supervised learning to point cloud registration in this study. Surprisingly, regardless of the proxy tasks used, self-supervised learning consistently results in negative performance. To uncover the underlying reasons, we conduct comprehensive experiments and analysis, including gradient-based analysis and proxy task adjustments. Moreover, we also attempt to use adapter-tuning to achieve further exploration both qualitatively and quantitatively. Upon these experiments and analysis, we find that the main obstacle stems from the inconsistent data distribution between pre-training and downstream task, which indicates that reducing the data distribution gap may be the core of future research. We hope that our work can offer valuable insights and inspiration for following studies on self-supervised learning and point cloud registration.