

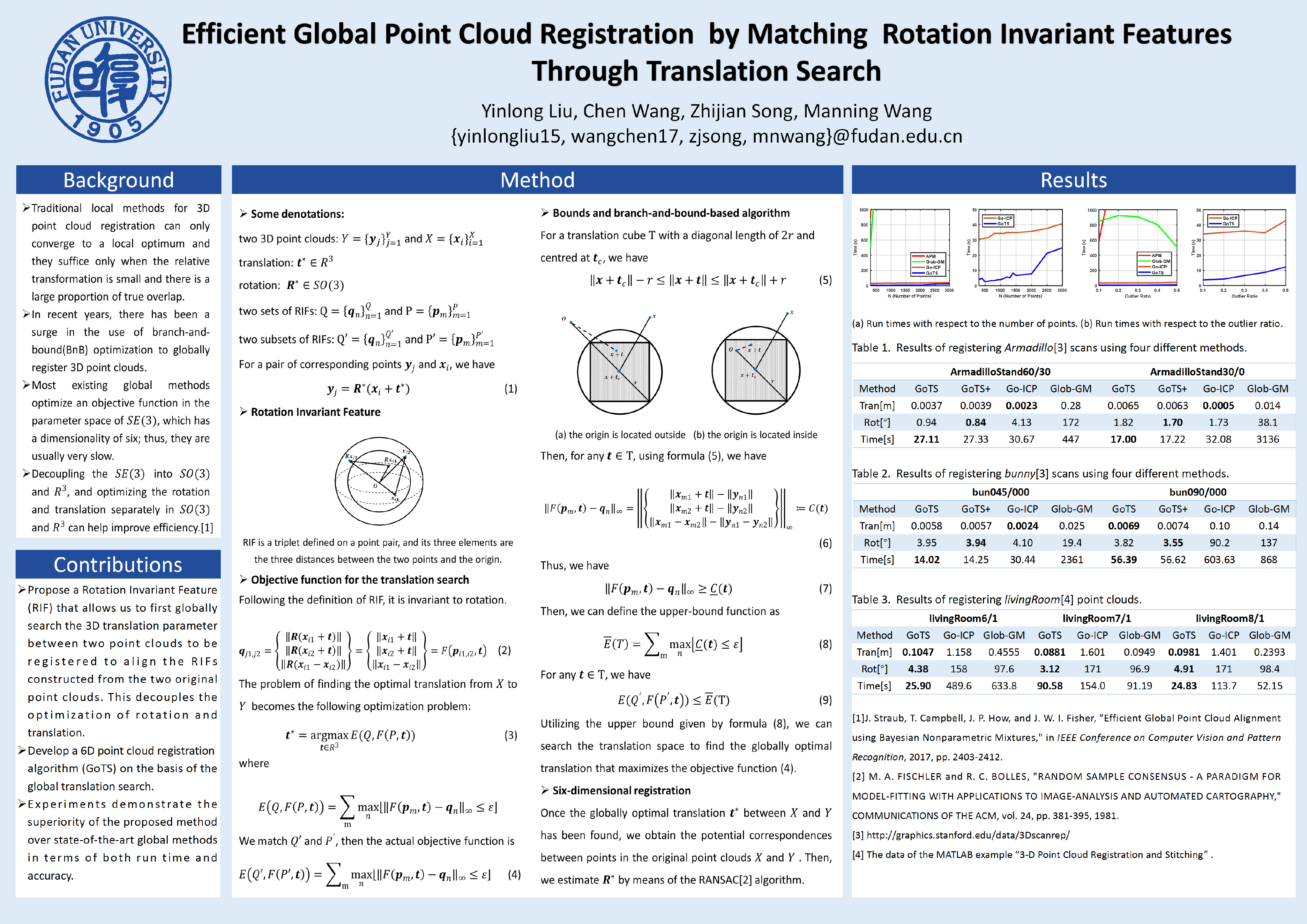
Three-dimensional rigid point cloudregistration has many applications in computer vision and robotics. Localmethods tend to fail, causing global methods to be needed, when the relativetransformation is large or the overlap ratio is small. Most existing globalmethods utilize BnB optimization over the 6D parameter space of SE(3). Suchmethods are usually very slow because the time complexity of BnB optimizationis exponential in the dimensionality of the parameter space. In this paper, wedecouple the optimization of translation and rotation, and we propose a fastBnB algorithm to globally optimize the 3D translation parameter first. Theoptimal rotation is then calculated by utilizing the global optimal translationfound by the BnB algorithm. The separate optimization of translation androtation is realized by using a newly proposed rotation invariant feature.Experiments on challenging data sets demonstrate that the proposed methodoutperforms state-of-the-art global methods in terms of both speed andaccuracy.
3维刚体点云配准在计算机视觉和机器人技术中有诸多应用。当相对变换较大或重叠率较小时,局部方法往往不能良好地配准,需要使用全局方法。大多数现有的全局方法在6D参数空间SE(3)上使用BnB优化。这种方法通常非常慢,因为BnB优化的时间复杂度随参数空间的维度呈指数上升。在本文中,我们对平移和旋转优化进行解耦,提出一种快速BnB算法,首先对3维平移参数进行全局优化,然后利用全局最优平移计算最优旋转。通过使用新提出的旋转不变特征来实现平移和旋转的单独优化。在具有挑战性的数据集上的实验结果表明,该方法在速度和准确性方面都优于当前最好的全局方法。
文章链接:
http://openaccess.thecvf.com/content_ECCV_2018/papers/Yinlong_Liu_Efficient_Global_Point_ECCV_2018_paper.pdf