2D-3D Point Set Registration Based on Global Rotation Search
Yinlong Liu#,Yuan Dong#, Zhijian Song*, Manning Wang*
IEEE Transactions on Image Processing (TIP) 2019
Abstract:
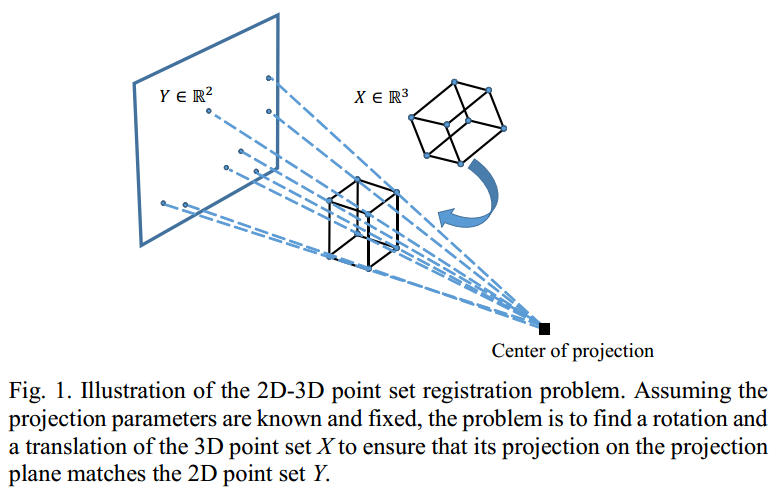
Simultaneouslydetermining the relative pose and correspondence between a set of 3D points andits 2D projection is a fundamental problem in computer vision, and the problembecomes more difficult when the point sets are contaminated by noise andoutliers. Traditionally, this problem is solved by local optimization methods,which usually start from an initial guess of the pose and alternately optimizethe pose and the correspondence. In this paper, we formulate the problem asoptimizing the pose of the 3D points in the SE(3) space to make its 2D projectionbest align with the 2D point set, which is measured by the cardinality of theinlier set on the 2D projection plane. We propose four geometric bounds for theposition of the projection of a 3D point on the 2D projection plane and solvethe 2D-3D point set registration problem by combining a global optimal rotationsearch and a grid search of translation. Compared with existing globaloptimization approaches, the proposed method utilizes a different problemformulation and more efficiently searches the translation space, which improvesthe registration speed. Experiments with synthetic and real data showed thatthe proposed approach significantly outperformed state-of-the-art local andglobal methods.