Robust Point Cloud Registration Framework Based on Deep Graph Matching
Kexue Fu,Shaolei Liu,Xiaoyuan Luo ,Manning Wang*
Internaltional Conference on Computer Vision and Pattern Recogintion(CVPR2021)
Abstract
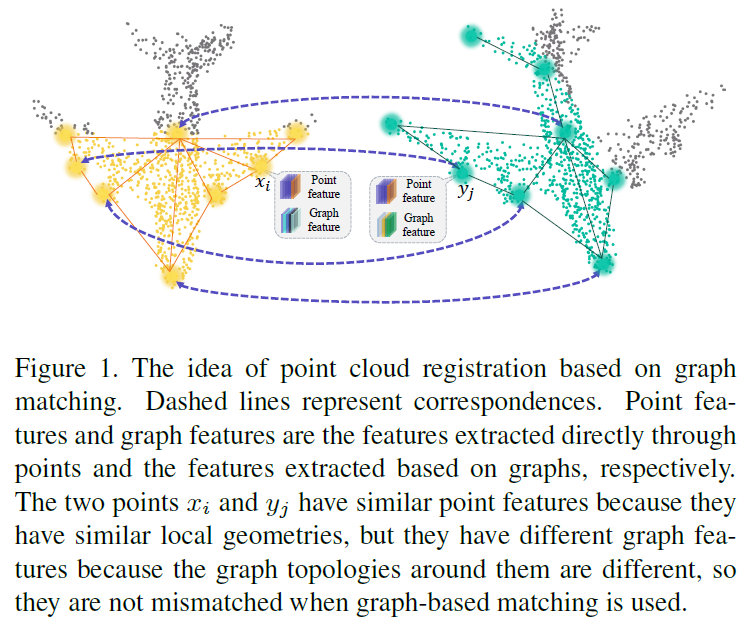
3D point cloud registration is a fundamental problem incomputer vision and robotics. Recently, learning-based point cloud registration methods have made great progress. However, these methods are sensitive to outliers, which lead to more incorrect correspondences. In this paper, wepropose a novel deep graph matching-based framework for point cloudregistration. Specifically, we first transform point clouds into graphs andextract deep features for each point. Then, we develop a module based on deep graph matching to calculate a soft correspondence matrix. By using graphmatching, not only the local geometry of each point but also its structure and topology in a larger range are considered in establishing correspondences, sothat more correct correspondences are found. We train the network with a lossdirectly defined on the correspondences, and in the test stage the soft correspondences are transformed into hard one-to-one correspondences so that registration can be performed by singular value decomposition. Furthermore, we introduce a transformer-based method to generate edges for graph construction,which further improves the quality of the correspondences. Extensive experiments on registering clean, noisy, partial-to-partial and unseen categorypoint clouds show that the proposed method achieves state-of-the-art performance.
Paper Link: https://openaccess.thecvf.com/content/CVPR2021/html/Fu_Robust_Point_Cloud_Registration_Framework_Based
_on_Deep_Graph_Matching_CVPR_2021_paper.html
Code Link: https://github.com/fukexue/RGM.git