Boosting 3D Point Cloud Registration by Transferring Multi-modality Knowledge
Mingzhi Yuan*, Xiaoshui Huang*, Kexue Fu*, Zhihao Li and Manning Wang†
International Conference on Robotics and Automation (ICRA 2023)
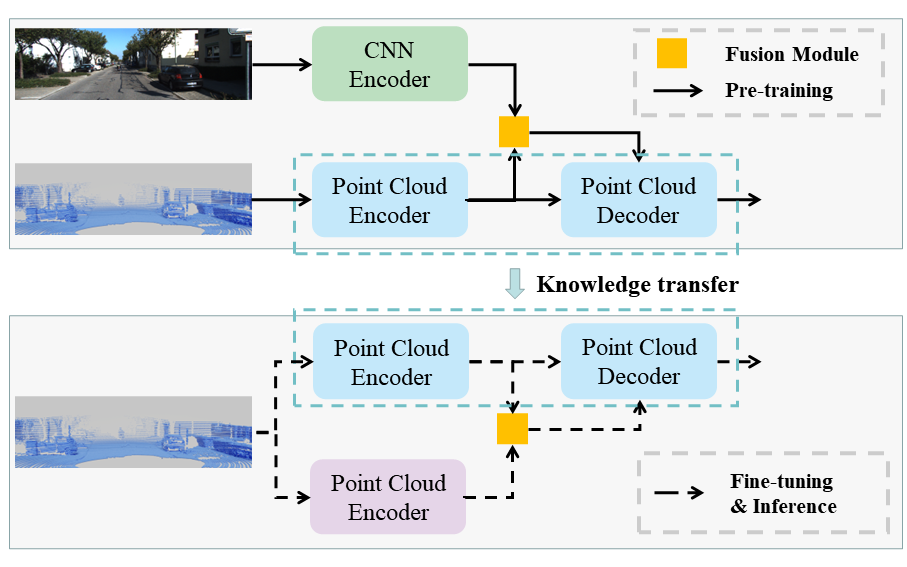
The recent multi-modality models have achieved great performance in many vision tasks because the extracted features contain the multi-modality knowledge. However, most of the current registration descriptors have only concentrated on local geometric structures. This paper proposes a method to boost point cloud registration accuracy by transferring the multi-modality knowledge of pre-trained multi-modality model to a new descriptor neural network. Different to the previous multi-modality methods that requires both modalities, the proposed method only requires point clouds during inference. Specifically, we propose an ensemble descriptor neural network combining pre-trained sparse convolution branch and a new point-based convolution branch. By fine-tuning on a single modality data, the proposed method achieves new state-of-the-art results on 3DMatch and competitive accuracy on 3DLoMatch and KITTI.