Boosting 3D Point Cloud Registration by Orthogonal Self-ensemble Learning
Mingzhi Yuan, Ao Shen, Yingfan Ma, Jie Du, Qiao Huang, Manning Wang†
IEEE Transactions on Artificial Intelligence
Abstract
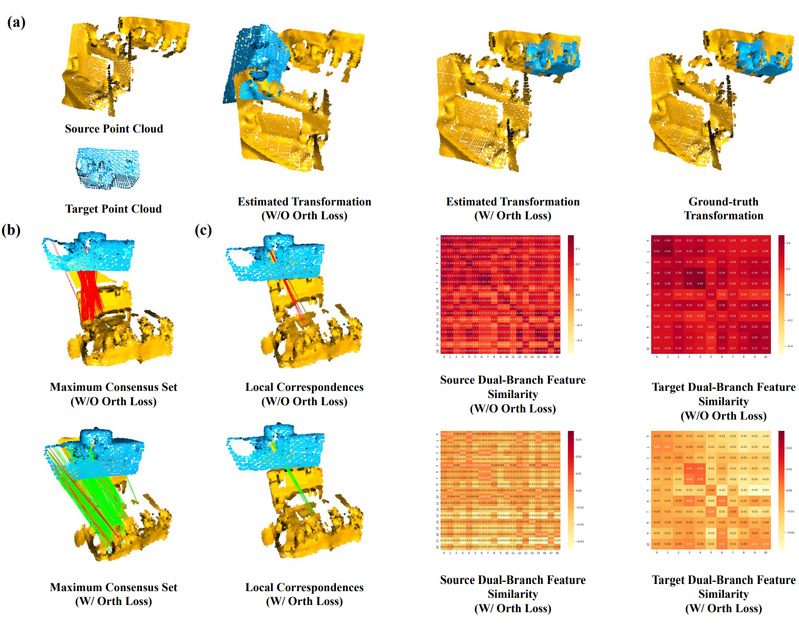
Deep learning has significantly advanced the development of point cloud registration. However, in recent years, some methods have relied on additional sensor information or complex network designs to improve registration performance, which incurs considerable computational overhead. These methods often struggle to strike a reasonable balance between computational cost and performance gains. To address this, we propose a plug-and-play orthogonal self-ensemble module designed to enhance registration performance with minimal additional overhead. Specifically, we design a novel ensemble learning strategy to mine the complementary information within the extracted features of previous methods. Unlike most ensemble learning methods, our method does not set multiple complex models for performance enhancement. Instead, it only cascades a lightweight dual-branch network after the features extracted by the original model to obtain two sets of features with more diversity. To further reduce redundancy between features and prevent the degradation of the dual-branch network, we introduce an orthogonal constraint that ensures the features output by the two branches are more complementary. Finally, by concatenating the two sets of complementary features, the final enhanced features are obtained. Compared to the original features, these enhanced features thoroughly exploit the internal information and exhibit greater distinctiveness, leading to improved registration performance. To validate the effectiveness of our method, we plug it into GeoTransformer, resulting in consistent performance improvements across 3DMatch, KITTI, and ModelNet40 datasets. Moreover, our method is compatible with other performance-enhancing methods. In conjunction with the overlap prior in PEAL, GeoTransformer achieves a new state-of-the-art performance.